Frame aligned Poincaré plots#
This notebook covers:
how to obtain frame aligned Poincaré plots (e.g. G-Frame)
how to use coil-fields with a GVEC
state
For the example we use a figure-8 like quasr-case from the vast and excellent quasr-database.
# set the number of OpenMP threads before importing gvec
import os
os.environ["OMP_NUM_THREADS"] = "1"
import numpy as np
import plotly.graph_objects as go
import matplotlib.pyplot as plt
from pathlib import Path
from gvec import Run
from gvec.coils import (
intersection_planes_from_state,
trace_fieldlines,
get_phi_edge_from_coils,
)
from gvec.scripts.quasr import load_quasr, get_coils_from_json_file
from gvec.util import chdir, read_parameters
Setting up the quasr case#
To build the quasr case we use the GVEC/QUASR interface, which
downloads the necessary files,
builds a suitable G-Frame,
provides a parameter file.
Also we extract the quasr coils into a GVEC CoilSet. There is a dependency on the simsopt python package to evaluate the objects from the QUASR database.
Note that per default the total toroidal flux \(\phi_{\text{edge}}\) is set to 1 Wb when using the QUASR interface. To get a more realistic value, we can estimate this value from the coil field and the initial equilibrium geometry via the utility function get_phi_edge_from_coils.
# choose a testcase / quasr ID
ID = 189686
# create a corresponding directory
save_path = Path("quasr")
if not save_path.exists():
save_path.mkdir()
with chdir(save_path):
# download the quasr case and translate it into a GVEC input file
load_quasr(ID, tol=1e-4)
# utility to get the quasr coils into a GVEC CoilSet
coil_set = get_coils_from_json_file(f"quasr-{ID:07d}.json")
# run the quasr case with GVEC
params = read_parameters(f"quasr-{ID:07d}-parameters.toml")
# increase this tolerance and resolution for more accurate equilibrium results
params["minimize_tol"] = 1e-4
# initialize a Run object, this does not yet solve for the equilibrium!
gvec_run = Run(params, quiet=False)
# Since we do not know the total toroidal flux we can estimate it from the coil-field
gvec_run.parameters["PhiEdge"] = get_phi_edge_from_coils(
gvec_run.state, coil_set
)
# to actually run the case uncomment the next line
# gvec_run.run()
state = gvec_run.state
Visualizing the 3D geometry#
# get the last closed flux surface positions and mod B
ev = state.evaluate(
"pos",
"mod_B",
rho=1.0,
theta=np.linspace(0, 2 * np.pi, 128),
zeta=np.linspace(0, 2 * np.pi, 64),
).sel(rho=1.0)
# extract the boundary geometry
boundary = ev.pos
def plot_3d_coils_plus_surface(
boundary, coil_set, surface_quanitiy, label=None, **kwargs
):
# visualize the coils
fig = coil_set.plot(
show=False,
line={"color": "black"},
showlegend=False,
)
fig["layout"]["scene"]["aspectmode"] = "data"
# plot the boundary colored with surface_quanitiy
fig.add_trace(
go.Surface(
x=boundary.sel(xyz="x"),
y=boundary.sel(xyz="y"),
z=boundary.sel(xyz="z"),
surfacecolor=surface_quanitiy,
colorbar_title_text=label,
**kwargs,
)
)
return fig
fig3D = plot_3d_coils_plus_surface(
boundary, coil_set, ev.mod_B, label="B / T"
)
fig3D.show()
Fieldline tracing#
initialize fieldlines on equilibrium flux surfaces by using the
posquantity from an evaluation datasetobtain event functions for frame aligned planes via
intersection_planes_from_state\(\rightarrow\) frame aligned Poincaré sectionsfor more customizable intersection planes use
gvec.coils.IntersectionPlanefor higher resolution plots one can increase the
timefor which to trace the fieldlines
n_rho = 4 # number of radial starting positions for fieldlines
# zetas where we want to place an intersection plane
zetas = np.linspace(0, 2 * np.pi / state.nfp, 4, endpoint=False)
# initialize the fieldlines on the flux-surfaces
rho = np.linspace(0.01, 1, n_rho)
starts = state.evaluate(
"pos",
zeta=0.0,
theta=0.0,
rho=rho,
).pos
# define frame aligned intersection planes
planes = intersection_planes_from_state(
state, zetas=zetas, min_box_size=0.1
)
# perform the fieldline tracing
tree_quasr = trace_fieldlines(
starts=starts,
coils=coil_set,
time=400, # increase this for better resolution
events=planes,
rtol=1e-6,
)
0%| | 0/4 [00:00<?, ?it/s]
25%|██▌ | 1/4 [00:04<00:14, 4.99s/it]
50%|█████ | 2/4 [00:09<00:09, 5.00s/it]
75%|███████▌ | 3/4 [00:14<00:05, 5.00s/it]
100%|██████████| 4/4 [00:20<00:00, 5.04s/it]
100%|██████████| 4/4 [00:20<00:00, 5.03s/it]
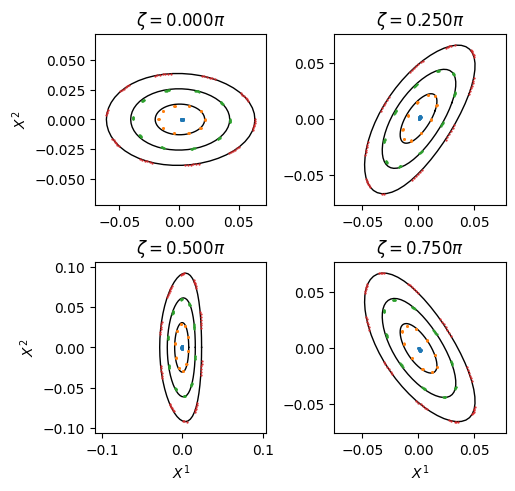
Frame aligned Poincaré plots#
if event functions are generated via
intersection_planes_from_state, the returned data-tree has entries for \(X^1\) and \(X^2\)new data-tree entries are numbered according to the events list, e.g.
event_0_X1for the first entry of the events list.\(\zeta=\) const. cuts of the equilibrium can be obtained via
plot_poloidal_plane
theta = np.linspace(0, 2 * np.pi, 128, endpoint=True)
fig, axs = state.plot_poloidal_plane(
rho_contours=4, zeta=zetas, quantity=None, theta_contours=0
)
axs = axs.flatten()
for fieldline in tree_quasr:
ds = tree_quasr[fieldline]
for i, ax in enumerate(axs):
ax.scatter(
ds[f"event_{i}_X1"],
ds[f"event_{i}_X2"],
marker=".",
s=1.5,
zorder=200,
)
Visualizing fieldlines in 3D#
ax3Df = coil_set.plot(
show=False,
line={"color": "black"},
showlegend=False,
)
ax3Df["layout"]["scene"]["aspectmode"] = "data"
for fieldline in tree_quasr:
# plot the fieldlines
ds = tree_quasr[fieldline]
ax3Df.add_trace(
go.Scatter3d(
x=ds.pos.sel(xyz="x"),
y=ds.pos.sel(xyz="y"),
z=ds.pos.sel(xyz="z"),
mode="lines",
opacity=0.01,
line={"color": "green"},
showlegend=False,
)
)
# plot the Poincaré section in 3D
for i in range(len(zetas)):
ax3Df.add_trace(
go.Scatter3d(
x=np.array(ds[f"event_{i}"].sel(xyz="x")),
y=np.array(ds[f"event_{i}"].sel(xyz="y")),
z=np.array(ds[f"event_{i}"].sel(xyz="z")),
mode="markers",
marker=dict(size=0.5, color="blue"),
showlegend=False,
)
)
ax3Df.show();
Using equilibrium quantities with coil-fields#
coil-fields can be evaluated at the equilibrium relevant positions using the
posquantity of an equilibrium datasettypical postprocessing is possible in this case
example calculates \(\mathbf{B}_{\text{coils}}\cdot \mathbf{n}\) on the equilibrium boundary (\(\mathbf{n}\) is the surface normal on the boundary)
ev = state.evaluate(
"pos",
"normal",
rho=1.0,
theta=np.linspace(0, 2 * np.pi, 128),
zeta=np.linspace(0, 2 * np.pi, 256),
)
n = ev.normal
ev_coils = coil_set.eval_mod_B(ev.pos)
Bdotn = (ev_coils.B * n).sum(dim="xyz")
Bdotn_norm = Bdotn / ev_coils.mod_B.mean()
Bdotn_norm = Bdotn_norm.sel(rho=1.0)
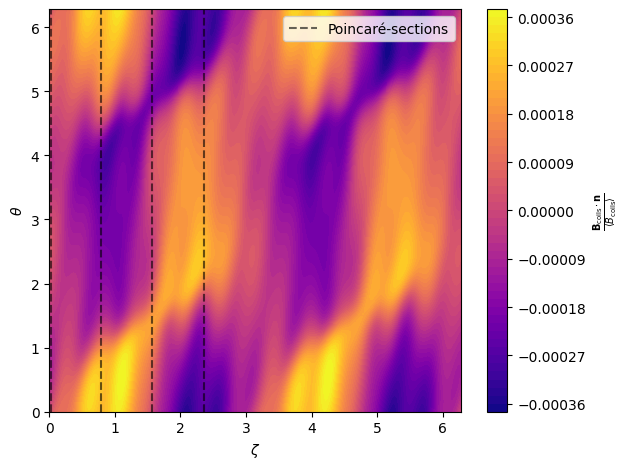
Visualizing \(\mathbf{B}_{\text{coils}}\cdot \mathbf{n}\)#
figc, axc = plt.subplots(tight_layout=True)
c = axc.contourf(
Bdotn_norm.zeta,
Bdotn_norm.theta,
Bdotn_norm,
levels=60,
cmap="plasma",
)
c_label = r"$\frac{\mathbf{B}_{\text{coils}}\cdot \mathbf{n}}{\langle B_{\text{coils}}\rangle}$"
axc.set(xlabel=r"$\zeta$", ylabel=r"$\theta$")
zetas[0] = 2.5e-2 # shift zeta=0 for better visibility in the plot
axc.vlines(
zetas,
0,
2 * np.pi,
linestyle="--",
color="k",
alpha=0.6,
label=r"Poincaré-sections",
)
axc.legend()
figc.colorbar(c, label=c_label);
Alternatively we can visualize this also in 3D.
fig3D_BdotN = plot_3d_coils_plus_surface(
ev.pos.sel(rho=1.0), coil_set, Bdotn.sel(rho=1.0), label="B.n / T"
)
fig3D_BdotN.show()